[ 機械システム工学科 ]
教員紹介
Professor introduction
ホーム > [ 機械システム工学科 ] 教員紹介

コンピュータビジョンシステム研究室(CVSLab.)
画像処理の産業応用、マシンビジョンの研究
- CVSLab.では「知的な目を持ったコンピュータ」の研究開発に取り組んでいる。機械における「目」はすなわち、外界の情報を習得するカメラである。得られた画像に「何がどのように」写っているかを「理解」する「ロボット・マシンビジョン」を世に送り出す。図は、CVSLab.が提案する「人のように画像中の間違いに気づく」処理の出力例である。このマシンビジョンは自動車製造ラインにおいて、人に代わってある重要部品を検査している。CVSLab.は画像処理・人工知能・ロボット研究を通じてエンジニア・研究者を育成し、かつ「ものづくり」に貢献することを目標としている。
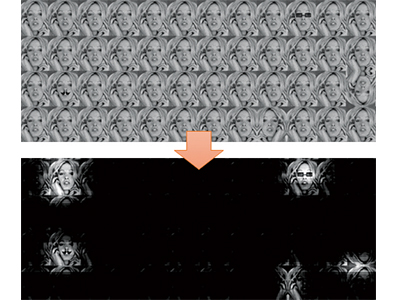
間違いに「気づく」マシンビジョン
- 担当科目
-
- 幾何学
- 機械設計製作法
- 機械四力学基礎
- 工学基礎実験B(体験・シミュレーション)

視覚・生体システム研究室
視覚系神経回路の情報処理に関する研究
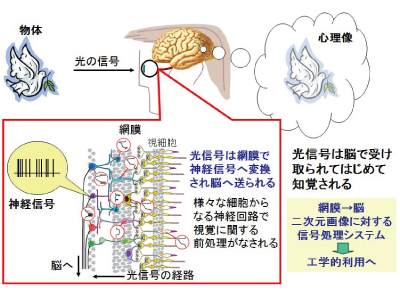
- 我々は脳で情報処理された結果から何を見ているか認識している。こうした視覚系の情報処理について、それを構成する神経細胞や神経回路について生理的知見に基づいた比較的詳細な数理モデルを使い、そのメカニズムを明らかにする研究を実施している。 視覚系の中で網膜は脳の出先器官とも呼ばれるように、単純に脳に情報を伝達するだけでなく基本的な視覚に関する前処理機能を有している。網膜での情報処理メカニズムを理解することは、脳を知るために重要と考え研究を進めている。さらにそれらの研究で分かった知見を画像メディア機器やセンシングデバイスなどへ応用する研究なども実施している。
- 担当科目
-
- 解析学2
- 数値シミュレーション
- ディジタル信号処理
- ニューロインフォマティクス論
- 機械システム工学基礎B
- 工学基礎実験A(体験・シミュレーション)

人間共生ロボティクス研究室
次のロボットを創る
- 人間共生ロボティクス研究室では、人と共に生活するロボットの研究開発を進めている。「運転振り返りロボット」の開発では、高齢ドライバーが教習所に通わなくても、自宅など身近な環境で運転映像をロボットと共に振り返り、運転行動の改善につなげることを目指している。また、人に「世話をする役割」を生み出して、独居高齢者や認知症患者に対する精神面・社会面の効果を評価し、生活環境の質を高める設計思想を探る研究も進めている。その他、オノマトペを用いた直感的なロボット操作、学び合いを支援する教育支援ロボット、身体の動きや表情によるロボットの感情表出、人の想定外の変化に適応するための学習・進化によるヒューマノイド動作の生成などの研究も進めている。

運転評価用の実車ドライブシミュレータ
- 担当科目
-
- 機械学習論
- Cプログラミング1
- コンピュータ・リテラシ
- 工学基礎実験B(体験・シミュレーション)

教授 木野 仁
学 歴
立命館大学 大学院理工学研究科 博士(工学)
最終職歴
滋賀医科大学 医学部 マルチメディアセンター 教務職員
福岡工業大学 工学部 知能機械工学科 教授
知能機械研究室
知能的な機械の開発を目指して
- ロボット工学を主な研究テーマとし、受動歩行、筋骨格システム、ワイヤ駆動ロボット、テンセグリティロボット、ロボット用アクチュエータ、学習制御など、メカづくりからプログラムまでを総合的に構築している。また、「ロボットを人間らしくコントロールする」視点を重視し、人間工学にも取り組んでいる。直近の代表的な研究事例には、ワイヤ駆動方式を利用した産業用ロボットの実用化が挙げられる。ワイヤ駆動方式のロボットは、従来の産業ロボットに比べ高出力、広い稼動範囲、省電力などメリットが多い。本研究ではワイヤ駆動方式の産業用ロボットの実用化を目指して、諸問題の解決に取り組んでいる。
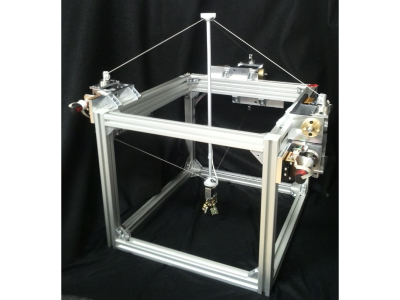
パラレルワイヤ駆動方式を用いた次世代産業用ロボットの開発
- 担当科目
-
- 振動工学
- 機械静力学基礎
- 機械静力学基礎演習
- 機械動力学基礎
- 機械動力学基礎演習
- 工学基礎実験A(体験・シミュレーション)
![]()
教授 清水 優
学 歴
名古屋工業大学 工学部 機械科
中京大学 大学院情報科学研究科 博士(情報科学)
知能レスキューロボット研究室
小型自律レスキューロボットの研究・開発・評価
- 人が入れない環境や人手が不足している環境では、ロボットの活用が進められている。広域災害では、大量のロボットで多くの倒壊家屋内を並列に調査し、要救助者や危険箇所の調査を素早く行うシステムの開発が期待されている。レスキューロボットには、不整地移動、人検出、自己位置推定・地図作成、マルチロボット情報統合、マルチロボット対応自律探索行動計画などの機能が求められる。その開発では、ハードウェア、ソフトウェア、画像処理、センサ技術、データベース、シミュレーションを含むロボット性能評価手法など様々な分野がある。それらの研究地盤を使って、学生個々の興味や特性に合わせた修論研究を行う。
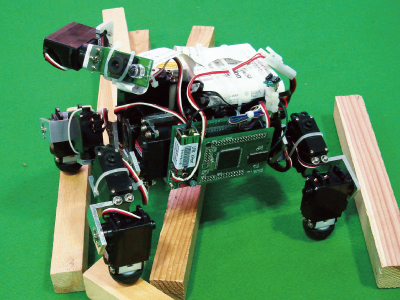
研究室で開発したレスキューロボット
- 担当科目
-
- 機械設計製作法
- 工学基礎実験B(体験・シミュレーション)

教授 野浪 亨
学 歴
名古屋工業大学 大学院工学研究科 博士(工学)
最終職歴
通産省工業技術院 名古屋工業技術研究所室長
(独)産業技術総合研究所 セラミックス研究部門 研究グループ長
名古屋工業大学 大学院都市循環システム工学専攻 助教授(併任)
(株)NSP 取締役(兼業)
バイオミメティック材料プロセシング研究室
バイオマテリアルの合成
- 体の一部を人工物で置き換える「バイオマテリアル」は皮膚や骨、血管などについて研究が進められ実用化されている。特に骨や歯はアパタイトというセラミックスを主成分としており、人工合成されたアパタイトが人工骨として利用されている。その合成法として応用され始めているのが、生体内での骨の生成システムを模倣することで生体内と同じ常温・常圧でセラミックスを合成し、環境への負荷が極めて小さいバイオミメティック材料プロセシングである。こうしたバイオマテリアルや環境保全材料の研究により、環境にやさしい(環境調和性)、人にやさしい(アメニティー性)材料を開発する事を目指している。
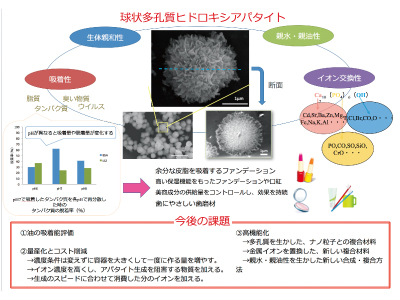
合成したマリモアパタイト™の電子顕微鏡画像
- 担当科目
-
- 解析学1
- 材料工学
- 工学基礎実験A(体験・シミュレーション)
知的センシング研究室(ASMI Group)
眼を持つ人工知能ロボットの研究
- 家庭や工場で活躍するロボットが高度な知能を持つためには、周辺環境を瞬時に知覚する視覚機能や、結果を的確な行動に結びつける高度な人工知能技術が必要である。橋本研究室では、画像や3次元データ処理に関する独創的技術、およびこれらを搭載した世界最先端の知能ロボットを開発している。たとえば、「コップを取ってきて」と簡単な命令を出すだけで、部屋の中から目的物を探してくる生活支援ロボットや、工場作業を強力に支援する産業用ロボットなど。これらの研究成果は、論文発表や国際的なロボット大会での上位入賞によって証明され、産学連携を通じて実社会にタイムリーに還元されている。

道具を巧みに使いこなす世界初のヒューマノイドお茶会ロボット
- 担当科目
-
- 線形代数学
- 画像センシング工学
- 知能ロボティクス
- 工学基礎実験B(体験・シミュレーション)

教授 森島 昭男
学 歴
東京工業大学 大学院理工学研究科 博士(工学)
最終職歴
通産省 工業技術院 電子技術総合研究所(現:独立行政法人 産業技術総合研究所)
ロボット&マンマシン・インターフェース研究室
ロボット&マンマシン・インターフェース
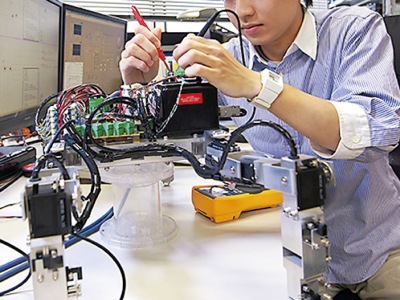
- 極限環境を踏破するロボットから、お座敷で手伝いをするロボットまで、様々な環境で動作するロボットの研究を行っている。また、人間が自らの意志を、それらのロボット達に伝えるための、マンマシン・インターフェースの研究も行っている。これらを開発・研究するためには、メカニズム、エレクトロニクス、コンピュータ(ハード&ソフト)の技術、および制御工学、材料工学、機構学、振動工学などの知識が必要とされる。当研究室の学生は、それぞれがテーマとするロボットを可能な限りゼロに近いところから作り上げ、システム全体の構築を体験することで、前述の技術・知識を身につけることを目指している。
- 担当科目
-
- CAE概論
- 機械設計製作法
- 工学基礎実験B(体験・シミュレーション)

准教授 王 建国
学 歴
名古屋大学 大学院経済学研究科
最終職歴
名古屋大学 経済学部 専任講師
生産システム研究室
生産システムのデザインと管理
- 本研究室では、生産システムのデザインと管理を中心に研究。具体的には、①生産形態と作業組織:社会システムと技術システムの相互関係を調査し、さまざまな生産形態に応じていかなる作業組織を設計すればよいか追究。②生産システムのシミュレーションの研究:生産システムをコンピュータ上で模式的に再現し、発生するさまざまな問題点を定量的に顕在化させ、既存システムの改善とより良い生産システムの発見に役立てる。③技術経営の研究:経営・管理が理解できる技術者を育成し、技術をベースにした新規事業をいかに起業して経営していくかの経営課題を取り込みながら、ベンチャー創業の学生をサポートする。
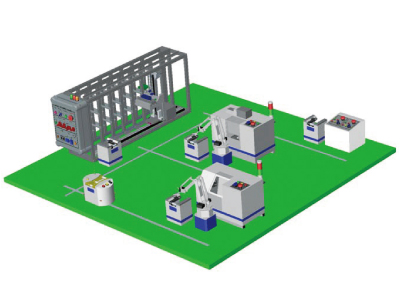
生産システムシミュレーション
- 担当科目
-
- 生産システム管理
- システム・シミュレーション
- 技術経営論
- 工学基礎実験A(体験・シミュレーション)

スマートロボットセンシング研究室(ASMI Group)
賢く器用なロボットの実現に向けて
- 深層学習技術の発展により、カメラに映った物体を素早く認識することや、その結果をもとにして、目の前の物体を正確に掴み上げる技術等のロボットのための知覚技術は成熟しつつある。今、知能ロボットに求められるタスクは、単純作業の代替だけでなく、掴み上げた道具を人間のように使用することや、周囲の人間の挙動に合わせて場にあった振る舞いをおこなうなど、より高度な知的作業である。本研究室では、コア技術である3次元データ処理技術を、物体認識や人物センシングに応用することによって、次世代の知覚技術創出に向けた研究開発に取り組んでいる。
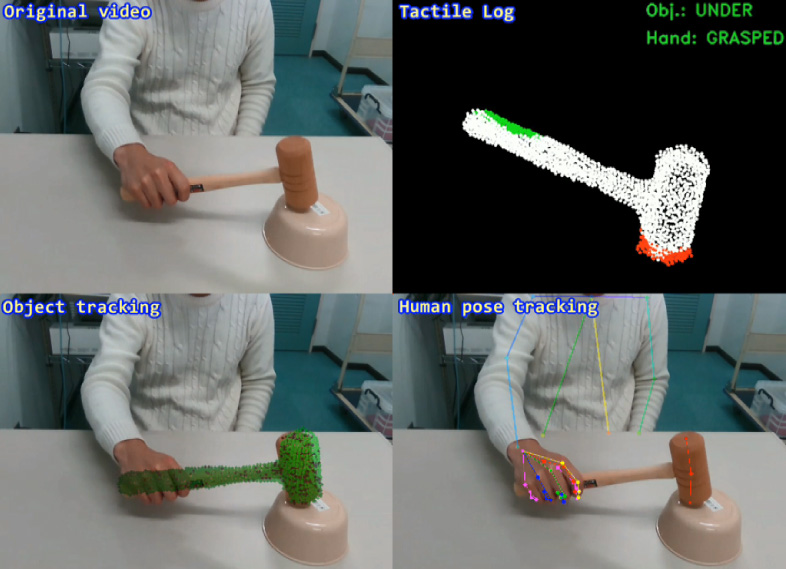
デモンストレーション動作解析による道具の使用方法の理解
- 担当科目
-
- 線形代数学演習
- データサイエンスA
- データサイエンスB
- ロボットプログラミング
- Cプログラミング2
- 機械システム工学基礎A
- 機械システム工学基礎B
- 工学基礎実験A(体験・シミュレーション)

講師杉野 貴明
学 歴
千葉大学 大学院工学研究科 博士(工学)
最終職歴
東京科学大学 総合研究院 生体材料工学研究所 助教
知的医療支援研究室
人工知能による医療支援技術の研究
- 人工知能技術を応用することで、外科医療を中心とした医療分野における診断・治療支援技術に関する研究に取り組んでいる。具体的には、医用画像からの解剖構造の自動抽出・可視化、病変の領域検出・浸潤評価による手術方針の決定支援、器具の操作情報解析と画像解析を組み合わせた医療手技評価による手技習熟支援など、質の高い医療の提供を支援するための研究を推進している。人工知能を応用した医療データ解析を通じて、実用的な医用システムの開発を目指している。
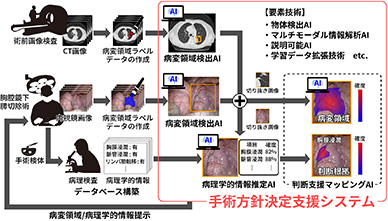
手術方針決定支援システム
- 担当科目
-
- 電気・電子・ディジタル回路
- データサイエンスA応用
- 計測制御プログラミング
- 機械システム工学基礎A
- 機械システム工学基礎B
- 工学基礎実験B(体験・シミュレーション)


