はじめて見るモノの姿勢・形を認識するAI技術の研究開発

工学部
秋月 秀一 講師
カメラに映った物体の位置姿勢を認識することは、モノを把持・操作するロボットにとっては欠かすことのできない基本的な技術です。モノの位置と姿勢が分かると適切な箇所を掴んで、操作することがすることができます。私たちは、製造の自動化のために使われていた姿勢推定技術の適用範囲を拡大するような性能の改善に取り組んでいます。
現在、物体の姿勢推定として広く使われている⽅法は、モデルベース認識と呼ばれる方法です。対象物の3D形状モデルとカメラで撮影した⼊⼒シーンを照合して、モデルとシーンの重ね合わせ誤差を最⼩化する姿勢を特定することによって姿勢を推定します。3D形状モデルとしては、部品設計時のCADモデルを使えばいいので、製造業にはマッチした方法でしたが、3Dモデルをそもそも持たない物体を取り扱うようなシチュエーションには利用できないという問題点がありました。3D モデルが公開されていない物体や、3D モデリングによる設計を経ないで製造される商品、形状に個体差のある⾷品等を対象とする場合です。
私たちは、物体の3次元位置姿勢だけでなく、その3D形状を同時に推定する深層学習モデルを提案し、この問題の解決に取り組んでいます。"ASM-Net"と名付けたこの方法は、特定カテゴリの物体の形状バリエーションを少数のパラメータでモデリングし、はじめて見た物体に対してどのようなパラメータなら形状を復元できるのか?ということを推定します。この手法によって、現物の3Dモデルを必要としない姿勢推定が実現しました。この成果をもとにして、人間のように日用品や食品等、デザインに多様性や個体差のあるモノをハンドリングできるロボットシステムの実現に取り組んでいます。
関連発表:
1. Shuichi Akizuki and Manabu Hashimoto, ASM-Net: Category-level Pose and Shape Estimation Using Parametric Deformation, The 32nd British Machine Vision Conference (BMVC), 2021/11/25.
2. 秋月秀一、橋本学、カテゴリレベル姿勢推定のための対象物の非剛体変形パラメータ推定手法、第27回画像センシングシンポジウム(SSII2021)、最優秀学術賞受賞。
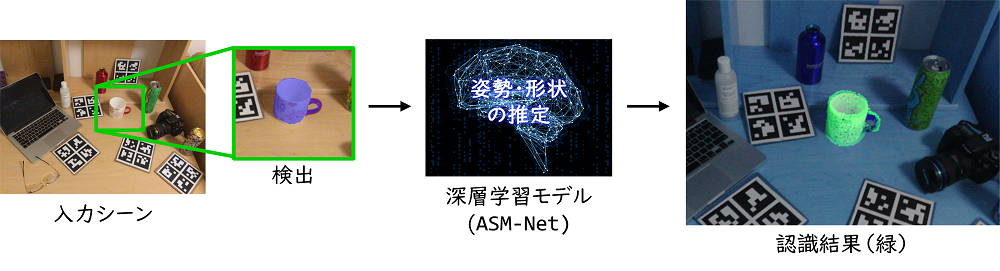
形状と姿勢を同時に推定する深層学習モデル(ASM-Net)の動作例
画像中に映っている初めて見るマグカップの3次元的な形状と姿勢の両方を認識している様子です