
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
機械情報工学科
|
|
Mechanics and Information Technology
|
|
|
|
|

|
|
社会に役立つロボットを研究しよう
ロボット全体のバランスを意識できる技術者を目指して |
|
清水 優
|
|
|
|
|
自己紹介
|
|
|
|
|
|
|
私は,自動的に仕事を行う仕組み(電気的,メカ的,ソフト的,分子生物学的,それを行えるなら何でも)に興味を持っています.必然的に,ロボットには非常に惹かれています.高校時代には,ICや LSIを組み合わせてマイコンを製作し,計算機の基本をハードとソフト両面から学びました.大学では,機械科に所属してメカニクスを学びました.卒業研究と就職後しばらくは, 3次元計測装置(物体表面の形状をコンピュータに取り込む計測器)の研究を行いました. 現在は(念願かなって),ロボット要素技術とそれらの応用アプリケーションとしてレスキューロボットに焦点を当てて研究・開発を行っています.
|
|
|
|
|
研究対象 |
|
|
|
|
|
私が研究対象としているのは,ロボット自体とロボットを構成するための個々の技術(要素技術)です.ロボットは,自動車と同じく要素技術の集大成です.しかもロボットの用途に応じて,それぞれの技術を特化する必要があります.この研究室では,小型移動ロボットをモチーフにして,そこで必要となる要素技術を開発しています.例えば,小型のロボットでも移動する際には,目的地に対する自分の位置を測定しなくてはなりません.レスキューロボットのように屋内での活動を想定すると,GPSは不向きであり,移動中の加速度などから位置を測定する装置が必要となります.また,でこぼこした地面には車輪ではなく脚による移動が向いているとなれば,関節の角度を制御し歩行などの動きを作り出すソフトウェアが必要となります.このような要素技術としてのハードとソフトは,万能型よりも,目的別に最適化されている方がロボット全体としてのパフォーマンス(速度や電源の持続時間など)が良くなります.ロボットの設計・製作では,ロボット全体を見据えながら細部を検討する必要があり,そのためのスキルや知識を学び取ってください.
|
|
|
|
|
ゼミ紹介 |
|
|
|
|
|
2年生秋学期〜3年生春学期では,簡易ロボットの製作を通して,組み込み CPUとその周辺ハードウェア,およびソフトウェア開発環境について学びます.ロボットコンペティション(皆さんでルールを決め,簡易ロボットに各自の工夫を加えて出場します)を目標にしますので,楽しくがんばることができます(写真1は相撲ロボットとしての製作例).
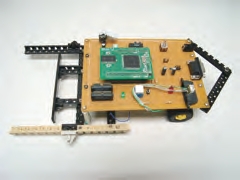
写真1 簡易ロボット製作例
また,毎年5月に開催されるロボカップに参加を希望する学生は,2年生2月〜 4月の間にロボカップ用ロボットの製作を行います.清水研究室は,レスキューロボットリーグに C-Rescueというチーム名で参加しています(写真2は,2007年に出場したロボット). 3年生秋学期では,ロボット関係学会の論文誌を調査し,実際に行われているロボット研究から,自身の卒研テーマの方向性を探ります.
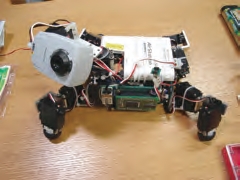
写真2 RoboCUP2007 に出場したレスキューロボット
4年生では,ロボットに関連するテーマで卒業研究を行います.テーマに応じて,ロボット製作,ソフトウェア開発,実験,評価などを行い,卒業研究発表会や卒業論文へのまとめを行います.最近の技術者は,仲間同士でのディスカッションや社内プレゼンテーションなどでアピール力が問われます.単に「作っておしまい」にするのではなく,やったこと・わかったことをアウトプットするテクニックも学び取ってください.
これまでの学生研究タイトル
(一部写真あり )
・CADモデルデータの二種の物理シミュレータ内オブジェクトへの自動交換手法の提案
・レンジファインダを用いた障害物回避行動システムの構築
・4輪 -クローラハイブリッド型移動機構の開発 (写真3)
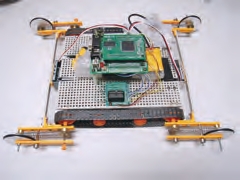
写真3 卒研ロボット1 複合移動機構
・2種類の移動機構を有する不正地移動ロボットの開発
・動画像とレーザレンジセンサによる移動ロボットの確率的自己位置推定
・定常モーションに任意の補正動作を付加するシステムの提案
・コミュニケーション機能を備えた遠隔操作ロボットシステムの開発
・ロボットハンドを用いた物体把持による材質判断 (写真4)
・硬さに応じた物体把持(写真4)

写真4 卒研ロボット2 負荷検出ハンド
・携帯端末によるロボットの遠隔制御
・感圧センサを用いたバランス制御による 2足歩行ロボット
・4足歩行移動ロボットに全方向移動機構を組み合わせた移動の効率化
|
|
|
|
|
担当科目 |
|
|
|
|
|
電子回路,機械設計製作I,機械設計製作IIA,機械設計製作IIB,ロボット製作論,振動工学
|
|
|
|
|
略歴
|
|
|
|
|
|
1991年 名古屋工業大学機械科卒
1991年 中京大学情報科学部情報科学科 助手
2000年 中京大学情報科学部情報科学科 講師
2007年 中京大学情報理工学部情報システム工学科 准教授
2008年 中京大学情報理工学部機械情報工学科 准教授
|
|
|
|
|
|
|
|
|

|